Walker
| Gerd sent me :
this link.
It's a design by
Keishiro Ueki.
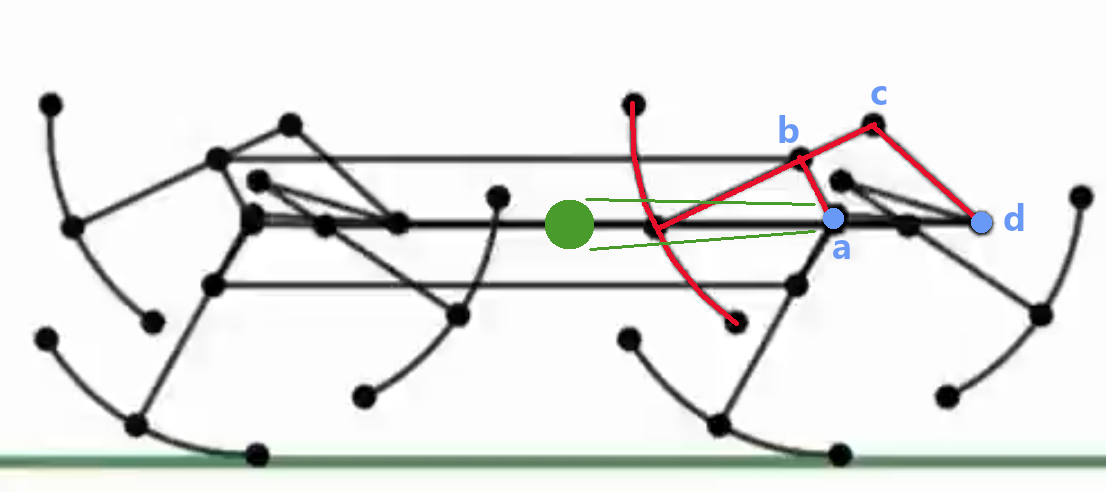
A single leg linkage is in red, with the blue points
a and d fixed.
(Play the local file)
bc + cd has to be slightly longer than ba + ad, so that point c
always remains above line ad.
| 
|
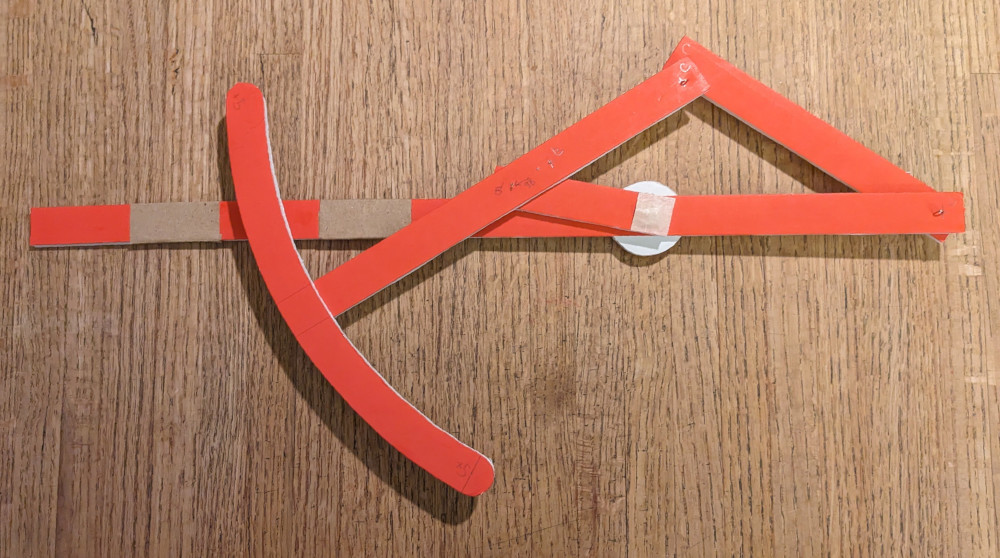
| Step 1: build a single leg. The other 2 have to be in separate
planes. A 4-cornered vehicle would need 12 legs.
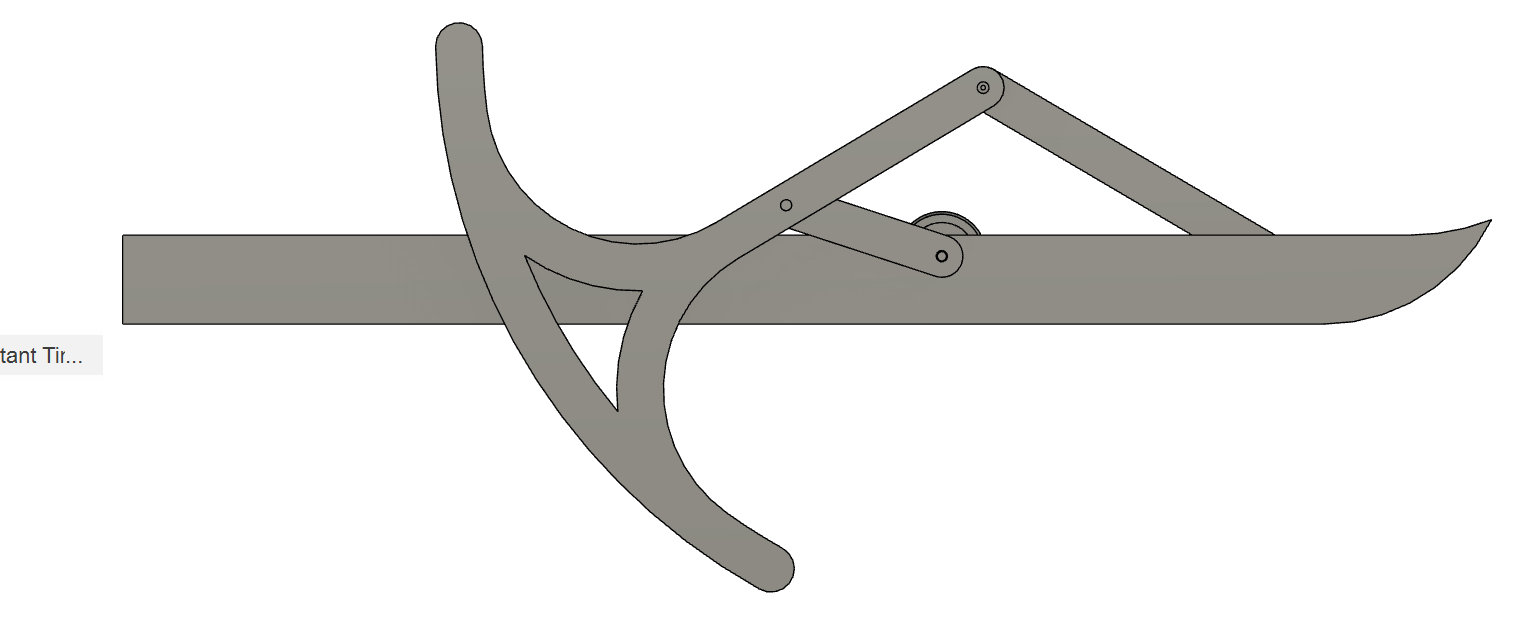
Foam core prototype, linkages need some adjustment. Then imported into Fusion 360
| 
|
| Laser cut out of 1/4" HDF/masonite (BOSS 85% power speed 15mm/sec) | 
|
Two major problems seen with this version:
| 
|
| For the floppyness in the transverse direction: there is no strength in that direction from the 1/4" axels - they are only a few mm long. Here I increased the diameter of the surfaces at each hinge to 7cm. | 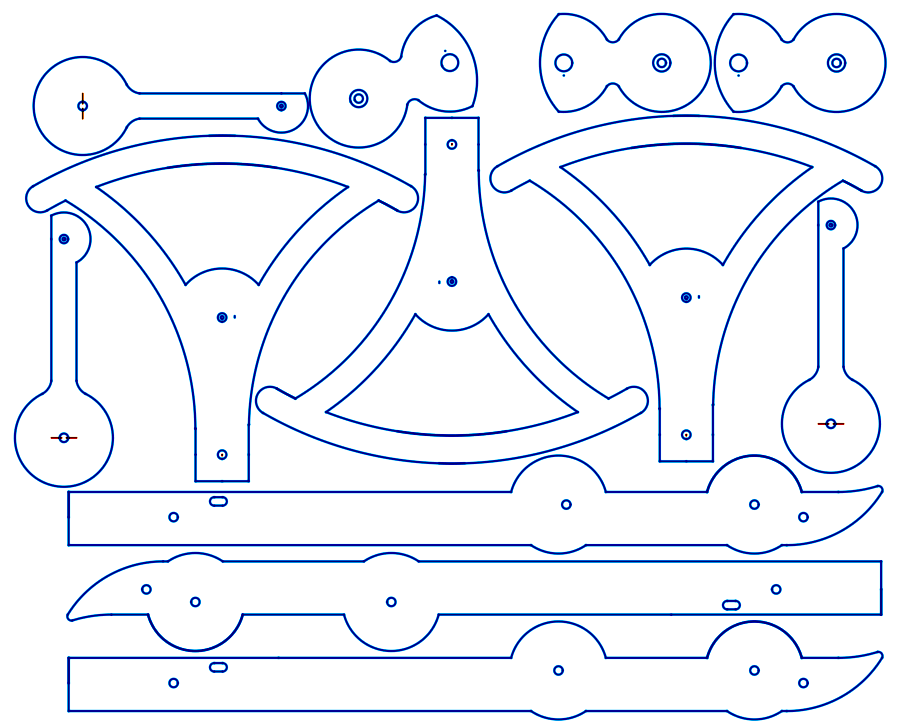
|
| I attached 2 small wheels in the back to turn it into a 'tricycle'. Transverse strength improved, but still too weak. | 
|
| Simple wedge tensioner takes care of skipping teeth | 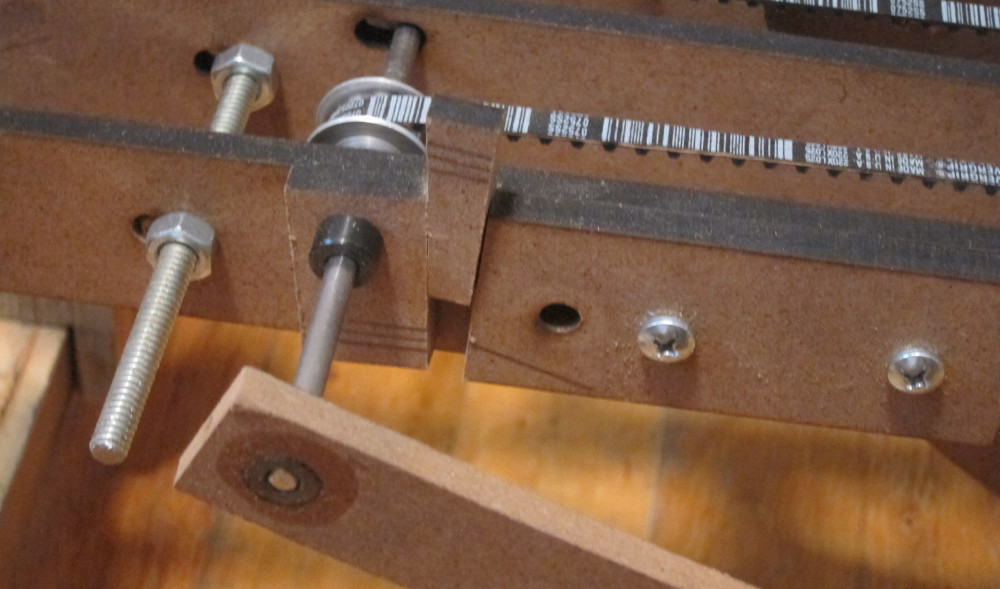
|
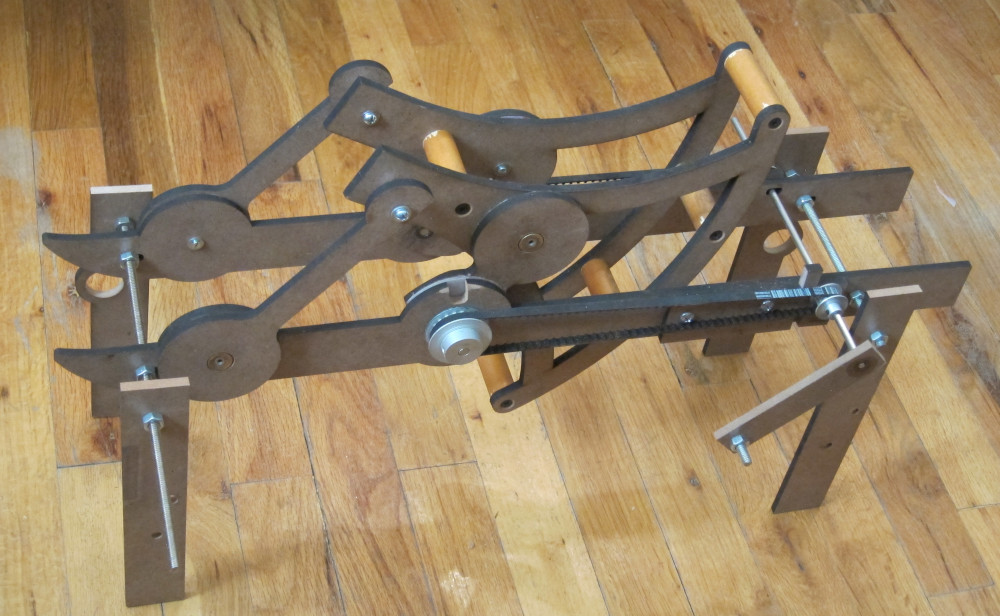
| Here I took 2 units, one the mirror of the other, and connected
the feet with 2" dowels.
This is completely stiff in the side-to-side direction!
Notice the four legs temporary. When the foot hits the floor, these are lifted up just a few mm, and the walker moves forward one step.
| 
|
| One full 'wheel' takes 3 of these, which would be
too wide. The 2" rigid spacers between the feet may be overkill.
Can I reduce the size of these spacers? Maybe to 0.0?
BTW, the torque required to run this configuration is 27 Newton-cm | |
| OK, double-sided linkages are a must. I had enough components to make 2. | 
|
| I added two steerable casters to the back, to make a
tricycle-like configuration. Next: motors and controls.
| 
|
| My first foray into automation and control: from an Elegoo starter kit I took the IR controller, IR sensor sensor and a SG90 servo. I got an ESP32 board from Make, and did some MicroBlocks programming. | 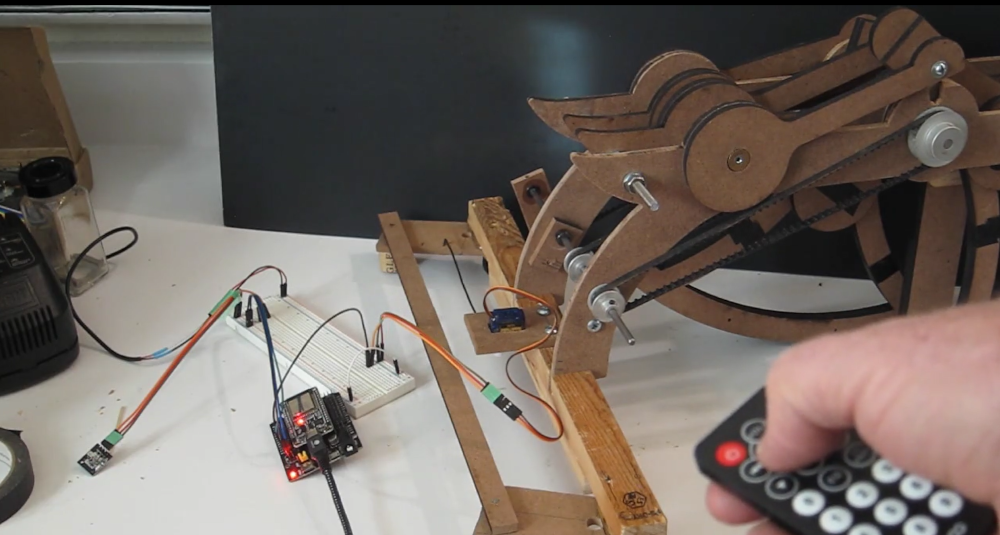
|